Kako funkcioniraju autonomna vozila i koji su još izazovi pred nama?
Autor: Tomislav Stančerić, Test Engineer (Quality Assurance), GlobalLogic Hrvatska
Što je autonomna vožnja?
Općenito govoreći, autonomna vožnja podrazumijeva samoupravljajuće vozilo ili transportni sustav koje se kreće bez intervencije ljudskog vozača. Takvo vozilo vozi po principu samostalne percepcije okoline pri čemu ne zahtjeva da vozač ručno upravlja njime ili da se čovjek uopće nalazi u vozilu dok je ono u pokretu. Bitno je napomenuti i da se autonomno vozilo može kretati svugdje gdje to može i tradicionalno vozilo s iskusnim vozačem.
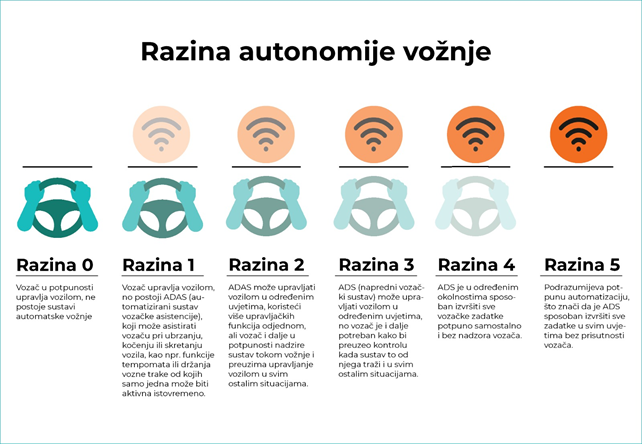
U 2014. SAE International (Društvo Automotive Inženjera) izdalo je standard koji je definirao raspon nivoa od najnižeg do najvišeg stupnja razvoja autonomnog vozila. Nulta razina podrazumijeva vozilo kojim u potpunosti upravlja vozač, dok peta razina podrazumijeva u potpunosti autonomno vozilo neovisno od vozača. Također, radi lakše podjele dobro je napomenuti da kod prve tri razine uglavnom vozač nadzire upravljanje vozilom, dok kod zadnje tri razine uglavnom vozilo nadzire svoje upravljanje, a vozač se uključuje prema potrebi sustava. Spomenute razine možemo promotriti na grafici.
Razine autonomije vožnje prema SAE Internationalu opće su prihvaćen standard u svijetu,
grafička obrada: Branimir Stančerić
Kako funkcioniraju autonomna vozila?
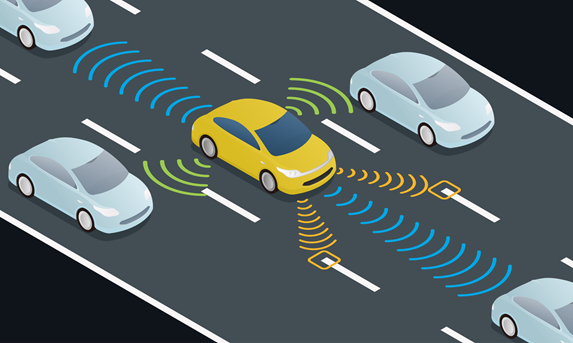
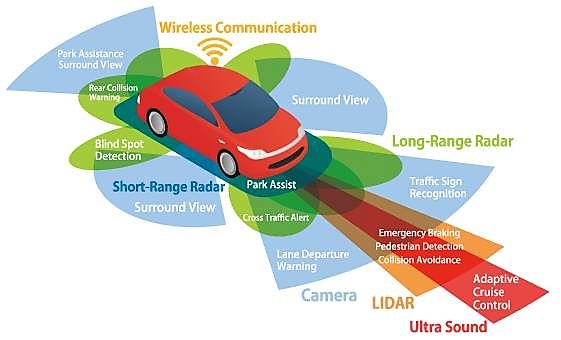
Autonomna vozila tokom vožnje stvaraju i održavaju mapu svojeg okruženja pomoću raznih senzora smještenih na raznim dijelovima vozila. Radarski senzori prate položaj drugih vozila u blizini, dok video kamere raspoznavaju prometnu signalizaciju, čitaju prometne znakove, te prate ostala vozila i pješake. Tu je također i Lidar tehnologija senzora koja funkcionira po principu odbijanja pulsirajuće laserske svjetlosti od okoline kako bi izmjerila udaljenosti, detektirala rubove ceste i oznake cestovnih linija.
Ultrasonični senzori u kotačima detektiraju rubnjake i druga vozila prilikom parkiranja, a sofisticirani softver koji obrađuje sve prikupljene senzorske informacije, crta putanju vozila i šalje instrukcije aktuatorima, koji kontroliraju ubrzanjem, kočenjem i upravljanjem vozila. Unaprijed upisana pravila, algoritam obilaženja prepreka, prediktivno modeliranje i prepoznavanje objekata pomažu softveru pri poštivanju prometnih pravila i navigiranju kroz prepreke.
Tehnološki prikaz autonomnog vozila, izvor: https://www.eltis.org/
Proizvođači autonomnih vozila i njihova upotreba
Većina ljudi pri spomenu na autonomnu vožnja prvo pomisli na prijevoz osobnim vozilom, no cijeli niz firmi u svijetu razvija raznoliku paletu autonomnih rješenja u prijevozu: od teretnog prijevoza, dostavnih vozila, taksija, turističkih vozila do raznih strojeva poput samoupravljajućih viličara i traktora.
Po pitanju razvoja autonomne vožnje uglavnom prednjače tehnološke IT kompanije i startupovi iz Amerike i Kine. Od američkih firmi na ovom polju prednjače Google-ov Waymo (u suradnji s Jaguarom) i General Motors-ov Cruise. Obje tvrtke razvijaju u potpunosti autonomna vozila za prijevoz tereta, dok firme poput Argo (Ford i VW), Motional (Hyundai) i Aurora (Uber) razvijaju autonomnu taksi tehnologiju. Tu su također Nuro koji razvija tehnologiju za dostavna vozila i Amazon-ov Zoox koji razvija mogućnost dijeljenja autonomnog prijevoza između više putnika.
Tu su još neka poznata imena poput Apple-a i Intela, a često se u medijima spominje i Tesla, kao pionir u razvoju automotive industrije, iako zapravo još uvijek ne razvija u potpunosti autonomno vozilo.

Autonomna vozila donose napredak, ali i ozbiljne izazove
Autonomna vozila su još uvijek godinama daleko od upotrebe u javnosti. Problemi s kojima se susreću se kreću od tehnoloških i zakonskih, pa sve do filozofskih pitanja i zaštite okoliša. Ovdje ćemo navesti samo neke od problema s kojima se autonomna vozila susreću:
Tehnološka pitanja – Lidar je skupa tehnologija kojoj je još uvijek potrebna fina kalibracija, a postavlja se i pitanje mogućnosti miješanja i ometanja signala senzora kod interakcije između dvaju i više autonomnih vozila ili recimo pitanje dovoljnog broja različitih radarskih kanala kod masovne proizvodnje automobila.
Vremenske neprilike – Kako će se vozilo ponašati kada se na cesti nalazi sloj snijega, leda, vode, ulja ili smeća koje smanjuje vidljivost okoline i ceste ili oznaka na njoj.
Prometni uvjeti i zakoni – Hoće li tuneli i mostovi predstavljati problem? Kako će se vozila ponašati u prometnim zastojima? Hoće li postojati odvojene trake za autonomna i tradicionalna vozila u gradu ili na autoputu?
Zakonska regulacija – Hoće li i kako će se ujednačiti zakonska regulacija autonomnih vozila među pojedinim državama kako bi se omogućio međunarodni promet? Hoće li se porezno opterećivati ili rasterećivati takva vozila? Hoće li ih obvezivati nulta emisija stakleničkih plinova?
Sigurnosna regulacija – Tko je odgovoran za nastalu štetu kod izvanrednog događaja: proizvođač, putnik ili netko treći? Hoće li biti omogućena ljudska interakcija putnika s vozilom u izvanrednim situacijama i na koji način?
Umjetna protiv emocionalne inteligencije – vozači se često oslanjaju na suptilne znakove i neverbalnu komunikaciju, poput čitanja ekspresije lica i govor tijela u kontaktu s pješacima i drugim vozačima kako bi reagirali u normalnim ili po život opasnim situacijama. Mogu li autonomna vozila reproducirati takvu vrstu povezanosti ili instinktivno reagirati u situacijama opasnim po život?
Tehnološki prikaz autonomnog vozila, izvor: https://www.researchgate.net/
Zaključak
Ideje i prednosti korištenja autonomne vožnje gotovo su beskonačne. Od vožnje na posao ili zubaru, pa do toga da vaš auto odradi dostavu paketa, šoping ili pokupi nešto što ste zaboravili kod kuće.
No, osim osobne koristi, pogodnosti autonomnih vozila treba gledati i u širem kontekstu, poput dramatičnog smanjenja emisije CO2, smanjena prometnih gužvi i nesreća, smanjenje gubitka ljudskih života i invaliditeta što bi u konačnici trebalo dovesti do povećanja kvalitete života. Vodeći razlog izazivanja prometnih nesreća je u najvećoj mjeri ljudski faktor, s razlozima poput umora ili gubitka koncentracije. Zamislite kada bi ste navečer ili rano ujutro umjesto da umorni sjednete i vozite, mogli leći i odspavati tokom vožnje.
Kako bi ponudio rješenje za globalni problem koji donosi promet danas, Institut za transportne studije Sveučilišta u Kaliforniji izradio je studiju u kojoj je predložio tri glavna koraka: automatizacija vožnje, elektrifikacija vozila i dijeljenje voznog parka. Ti koraci bi do 2050. mogli smanjiti broj auta na cesti i za 30%, smanjiti troškove voznog parka, goriva i infrastrukture za 40%, smanjiti broj parkinga, a povećati broj pješačkih i zelenih površina. To bi rezultiralo dramatičnim smanjenjem emisije CO2 u urbanim sredinama u cijelom svijetu i do 80%.
Autonomna vožnja predstavlja velik tehnološki skok i napredak za čovječanstvo. Budući da je promet sastavni dio čovjekovog života, postaje jasno da tako velika promjena stvara nove izazove koji zahtijevaju širu transformaciju našeg društva što je kompleksan, skup i dugoročan proces koji je potrebno kvalitetno planirati i odraditi.
Izvori: